 Esperanto
Esperanto
 Shqiptare
Shqiptare
 Euskara
Euskara
 Zulu
Zulu
 Latinus
Latinus
 Cymraeg
Cymraeg
 தமிழ்
தமிழ்
 Slovak
Slovak
 Slovak
Slovak
 Afrikaans
Afrikaans

News Center
Detailed explanation of CAN bus protocol
Publish:
2022-07-24 23:03
Source:
www.premier-cable.net
Detailed explanation of CAN bus protocol
CAN bus definition :
CAN (Control Area Network) belongs to the category of field bus and is a serial bus with high performance, high reliability, easy development and low cost.
CAN was designed by the German company Bosch in 1986 for vehicle monitoring and control.
Due to its high performance, high reliability, real-time and other advantages, it is also widely used in various fields such as industrial automation, various control equipment, vehicles, medical instruments, construction, and environmental control. It is widely used in each field. Facilitated the standardization process.
In September 1991, PHILIPS SEMICONDUCTORS formulated and released the CAN technical specification V2.0, which includes two parts, A and B.
2.0A once defined the CAN message format in CAN technical specification 1.2, providing an 11-bit address; while 2.0B provides two standard and extended message formats, providing a 29-bit address.
Since then, ISO also officially released the international standard ISO11898 for CAN in November 1993. Among them, ISO11898-1 defines the CAN data link layer; ISO11898-2 defines the non-fault-tolerant CAN physical layer; ISO11898-3 defines the fault-tolerant physical layer of 11898-3.
The CAN bus protocol only defines the physical layer and the data link layer. To apply the CAN bus to actual engineering projects and product development, the upper layer application protocol must be formulated. At present, the protocols used in automobiles include: ISO15675 (transport layer protocol), ISO14229 (application layer protocol) and so on.
Features of CAN bus
1. Multi-master control mode. When the bus is idle, all units can send messages on the bus (multi-master control). The first unit to access the bus can get the right to send (using CSMA/CA). When multiple units transmit at the same time, the node with the smaller CANID gets the right to transmit.
2. Non-destructive bus arbitration technology. When a bus conflict occurs, high-priority packets can be transmitted unaffected to ensure the real-time requirements of high-priority; while low-priority packets are withdrawn from transmission.
3. High reliability. Each frame has a variety of error detection such as bit stuffing, CRC check, etc., to ensure a very low error rate; data frames that are lost during transmission or that are damaged due to errors can be automatically retransmitted (this is retransmitted by the CAN controller itself. send, no need to manually reload send data).
4. Automatically shut down the bus. The CAN controller can detect and determine the type of error on the bus, whether it is a transient data error (such as external noise), or a persistent data error (such as internal unit failure, driver failure, short circuit failure, etc.).
When the error is a persistent fault, the CAN controller can be automatically shut down and disconnected from the bus, so as not to affect the normal communication of other nodes on the bus.
Premier Cable CO LTD is a cable factory with 400 workers, we also make USB serial cable , USB to RS232 RS485 cable, OEM Cable and Wire Harness
For different application, we also make the DB9 connector and RS232 Cable angled, like right angle RS232 Cable, left angle RS232 Cable, up angle RS232 Cable, down angle RS232 Cable
Welcome to your inquiry or visit our Website : www.premier-cable.net
Our cables can be used for below industry or applications :
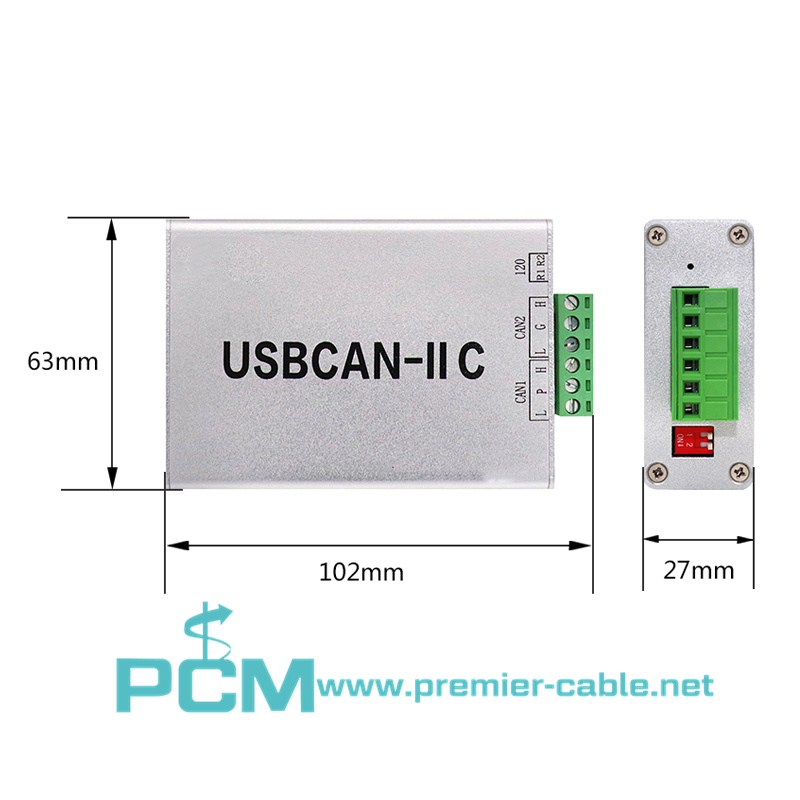
CAN converter
CAN Bus analyzer
CAN bus network
Series USB to CAN
Can Bus Converter
USB to Can Adapter
USB CAN-FD Adapter
OBD CAN Bus analyzer
USB CAN Bus analyzer
USBCAN-OBD adapter
PEAK PCAN-USB IPEH-004022
Tel : 0086-0139-2949-7934
Skype : james198585
Email : James@premier-cable.net
Email : sales@premier-cable-mfg.com







Related News
What is a terminal block used for?
While there are many factors to consider when designing an overall system, terminal blocks are an optimal solution for complex electrical system connections. With a variety of color options and configurations, Premier Cable’ terminal blocks offer a range of options to meet your design challenges.
CAN-bus has been widely used in various automation control systems. For example, CAN-bus has incomparable advantages in various fields such as automotive electronics, automatic control, smart buildings, power systems, and security monitoring.
Introduction to M12 connector pin coding
M12 encoding types are A encoding, B encoding, D encoding and X encoding. A-code, B-code and X-code are some of the earliest developed and longest-available M12 connectors. The latest M12 coding types currently under development are K coding for AC and L coding for PROFINET DC.
Cables – What are the correct cable sizes for an NMEA 2000 network?
The three different sizes of NMEA 2000 certified DeviceNet standard cabling are "micro," "mid," and "mini."
What are the advantages of NMEA 2000?
The Premier Cable Starter Kits provide everything you need to get to create a basic NMEA 2000 network from scratch.
The role of DeviceNet terminal resistor
DeviceNet_network is a fieldbus network protocol based on Controller Area Network (CAN). In the DeviceNet network, the terminal resistor plays the role of compensation and protection for signal transmission. The function of the terminal resistor is to eliminate signal reflection and interference and ensure the signal transmission quality.